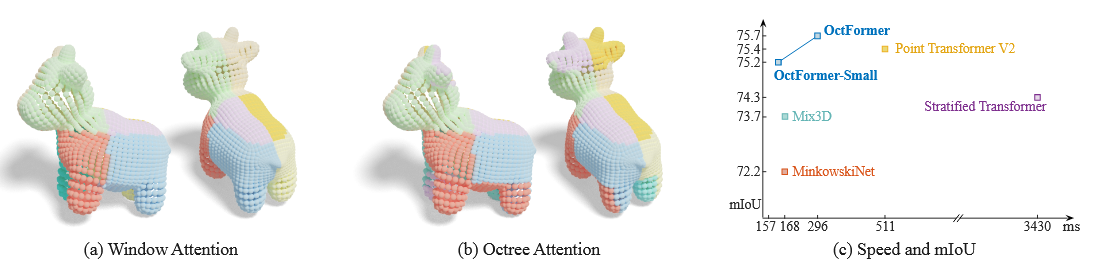
IntroductionOctFormer는 Octree 기반의 Transformer 아키텍처를 제안한 모델로, 기존 Transformer의 비효율적인 연산 복잡도(O(N²)) 문제를 해결하고, 대규모 포인트 클라우드에 확장 가능한 구조(스케일 업)를 갖는 것을 목표로 한다.요약하면, 세 가지 핵심 특징이 있다:1. Octree Attention 제안기존 윈도우 어텐션은 정해진 크기의 정육면체 윈도우로 나누기 때문에, 윈도우마다 포함되는 포인트 수가 불균형해 연산 효율이 떨어진다.반면, OctFormer는 Octree 기반으로 포인트를 정렬하고, 각 윈도우에 동일한 수(K)의 포인트만 포함되도록 하여 균일한 연산 단위를 만들고 GPU 병렬 처리에 유리한 구조를 갖춘다.2. Dilated Octree Atte..